Consortium:
Fraunhofer Austria Research GmbH
JOANNEUM Research Forschungsgesellschaft
craftworks GmbH
Project Hashtag:
#SUSPICION
Watch the experiment’s video here.
Overview
The main objective of this proposal is to predict robot failures in spot welding applications and propose corresponding instructions for actions in order to decrease operational downtime by approximately 30%. By combining different mathematical and numerical models from reliability theory and quality control, industrial artificial intelligence methods for classification and regression analysis as well as domain knowledge in the system behaviour of welding applications, a self-learning characteristic space with a dynamic number of dimensions and states is created. This space can be used to i) interpret machine data and ii) decide for actions on the machine.
The basis for the data interpretation is a synchronous course of sensor and status information as well as error logs, which results in the identification of characteristic behaviour patterns of the robots as well as a projection into a common representation. Additionally, relevant robot error states are determined in a failure mode and effects analysis (FMEA) by robot experts for providing additional covariates in the data sets of the provided spot welding cycles. Detecting further possible sources of failure by applying classification algorithms is also feasible. By combining reliability theory with unsupervised, supervised or reinforcement learning, the model is then capable of i) predicting system failures, i. e. discrete failure classification and failure rate estimation (with covariates), ii) identifying even more detailed classifications so as to increase the reliability of prediction and iii) deriving recommendations for actions.
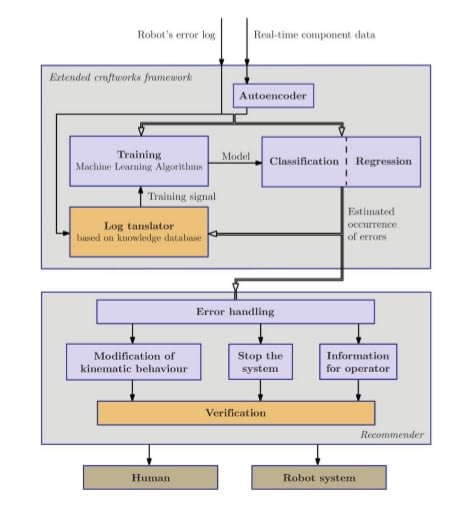
Industrial artificial intelligence based methods not only make maintenance more efficient for shop floor personnel by providing real-time recommendations but also provide deeper knowledge with regard to the system’s behaviour and downtimes by dynamically identifying new correlations and patterns within relevant data sets.