ROWER (Robotic Weed Remover)
Consortium: Dahlia Robotics GmbH
Project Hashtag: #RobotsforSustainableFarming
Link to a demonstration video: Click here
Overview
Weeds significantly reduce crop yields due to competition for water, nutrients and sunlight. Traditional weeding techniques include: Herbicides, with concerns for the environment, the food chain and the health of the operators; Tractor-mounted tools, with poor efficiency; and Manual Labour, with high costs.
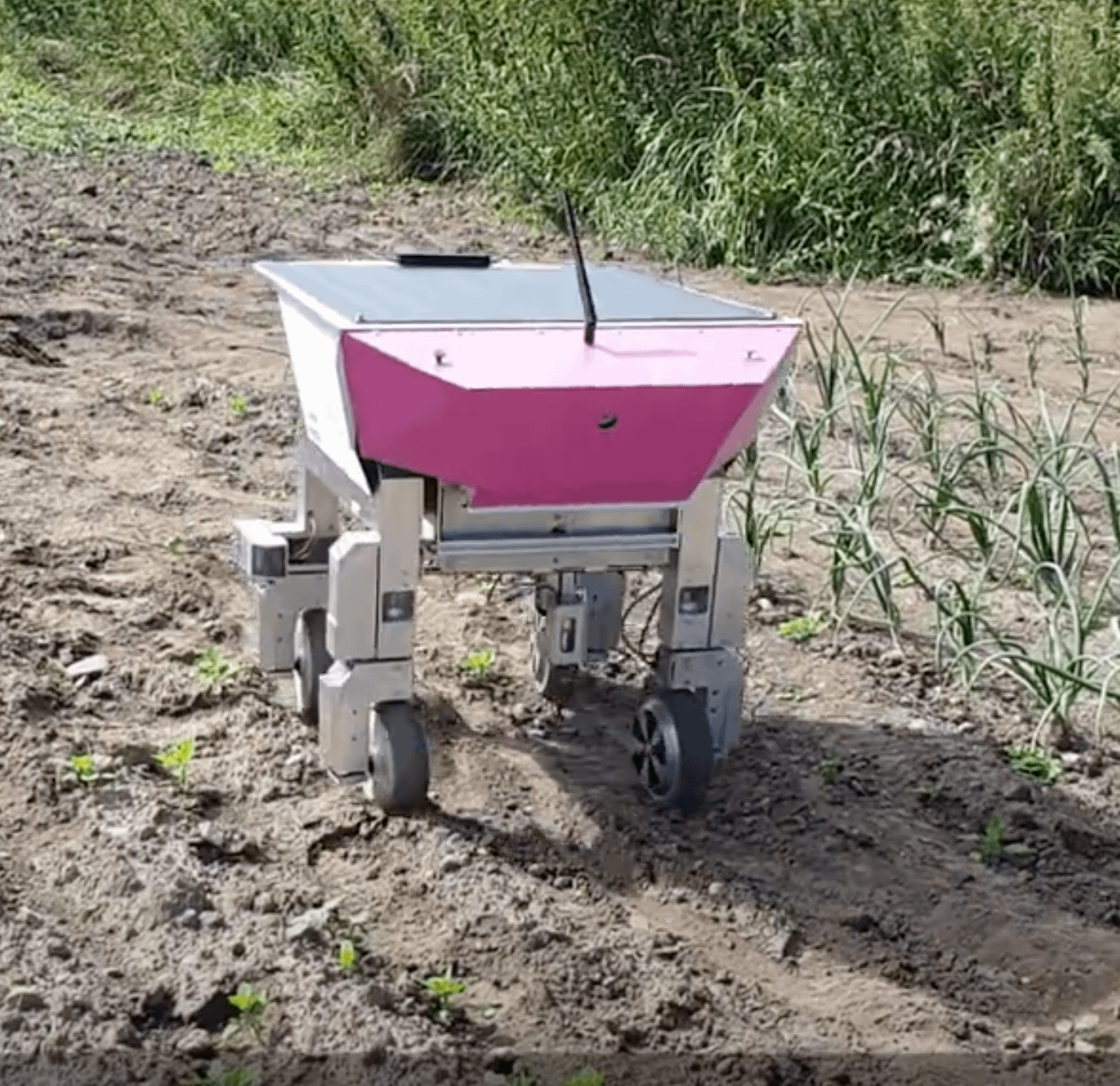
Dahlia Robotics GmbH is developing a robot which addresses these problems with a bespoke and innovative solution, which drives autonomously through agricultural fields, recognises weeds from crops, and mechanically removes weeds. An image stream from an on-board RGB camera is fed to a neural network to detect weeds from crops at the pixel level. Such degree of accuracy is required in order to detect and remove the most critical weeds, i.e. those that are positioned very close to the crop plants, whilst minimising the chances of accidentally damaging valuable crops.
The information generated by the neural network is used to position and actuate a mechanical end-effector, which removes / significantly damages weeds. The end-effector is moved to the desired position via a series of bespoke sliding elements to ensure a high degree of precision in the weed removal process. The neural network output stream is also used by the on-board GPU for crop line detection purposes. The base of the robot is designed to be able to maneuver in tight spaces, uneven and inclined terrain, and differing soil conditions as a result of its 4-wheel drive, the differential leg design, as well as the ability to turn each wheel independently. A solar panel on top of the robot provides additional power autonomy, eliminating the need of diesel-motors, and hence reducing the environmental footprint of our proposed solution.