Consortium:
Pulverizadores Rocha, INESC TEC Tecnologia e Ciencia
Project Hashtag:
#PRySM
Watch the experiment’s video here.
Overview
Steep slope vineyards, although represent only 7-12% of total European vineyards, they produce wines with recognized quality (e.g. Port Wine) and they have an undeniable identity, heritage and historic value, which are seriously threatened. Apart the orographic and marginal conditions, these vineyards share other factors that prevent conventional mechanization (e.g. small vineyards, not always contiguous, presence of terraces) and often do not warrant the economic sustainability of vine growing.
Cultivation of mountain and steep slope vineyards requires a high number of working hours (higher than 1500 h/ha/year) increasingly rare and expensive, therefore grape-growers are considering innovative mechanization solutions to reduce operating costs, execute timely cultural practices and increase flexibility within their operations. Spraying is a critical operation for these vineyards since they require about 20-30% of the total annual work time of the vineyard.
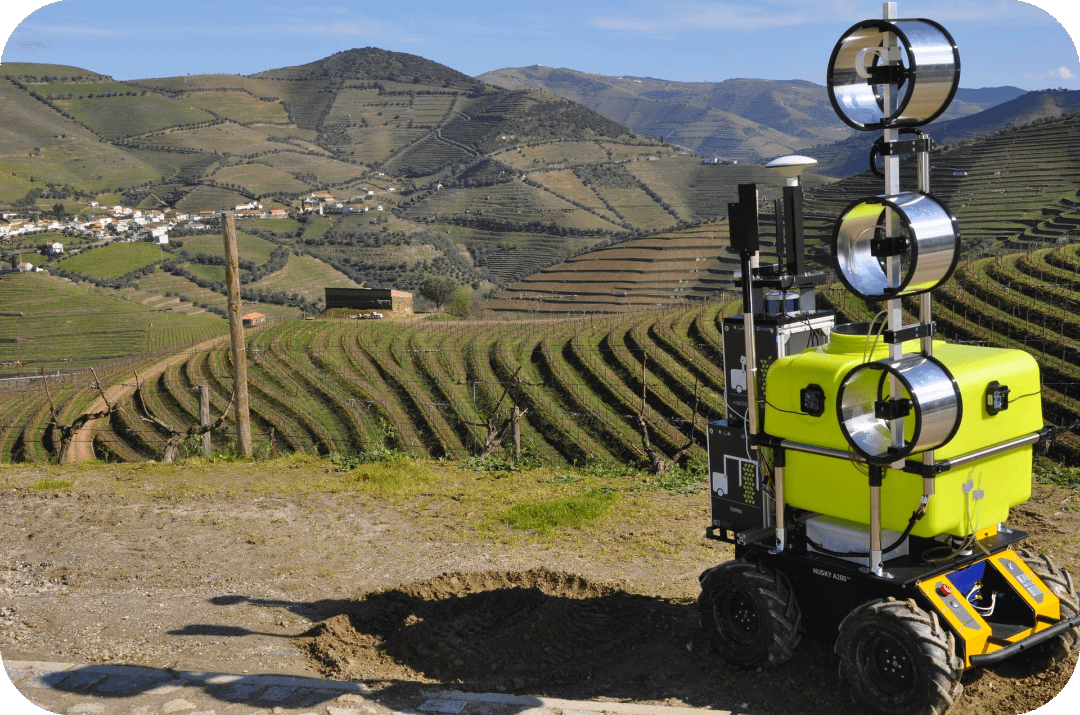
The main bottlenecks for spraying these vineyards are the lateral and transversal slope, terrain with stony surface, narrow row sizes, (90 – 150cm, bards’ curvature and canopy heterogeneity. Currently spray operation are based on sprayers transported on the back (manual) or, where possible, a small tractor-based system that considers an air-blast based system. Both current solutions have major shortcomings. Manual spraying is struggling with the lack of manpower in the region to perform a heavy and non-ergonomic operation. The use of the tractor has low spraying efficiency due to off-target and soil compaction problems. Inspired by this problem, this project develops a modular and precision terrestrial sprayer robot – the Precision Robotic Sprayer (PRySM) – capable of operating autonomously on rugged terrain with steep slopes and under the most diverse ground conditions.
A robotic platform will be adapted to work on hard terrain conditions and whose dimensions and locomotion mechanism allow tight manoeuvring in the context of mountain vineyards with very narrow rows. This robot will be equipped with advanced algorithms for self-localization and navigating using LiDAR and GNSS receiver data to support precision spraying tasks. The project will develop and integrate a novel precision autonomous spray tool into the developed robotic platform. The PRYSM robot will be tested and validated in a steep slope vineyard in Douro wine region and perform an autonomous precision spraying operation during January of 2021.