Consortium:
MDM Team, Universitá degli Studi di Firenze
Project Hashtag:
#esmera-romero
Watch the experiment’s video here.
Overview
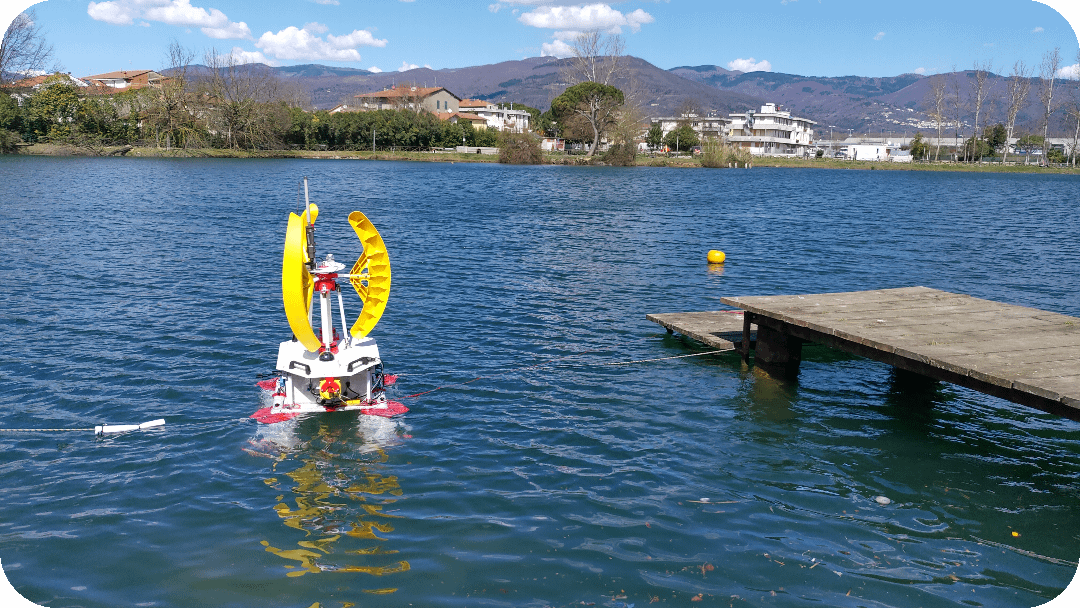
ROMERO will develop an unique distributed system, ready to be deployed in a extreme scenario environment to gather all the distributed sensors data and to support safety and civil protection officers involved into monitoring and observation of volcanic activities. ROMERO will include: an environmental data sensing system that will continuously collect information about surface and submerged area through a weather station and a sea buoy, providing reliable and systematic data analysis and abnormalities detection; web portal to support decision making process, by providing access to data and historical data and ultimately giving access to the automatic engagement of aerial and underwater drones for field data collection. ROMERO system is expected to reach TRL6 at the end of the second phase (Q4/2021), including a novel underwater low-cost vehicle, an aerial drone with related advanced base station, and an integrated environmental data sensing system. ROMERO will demonstrate its responsiveness, robustness and reliability during the final test in the island of Vulcano in the Aeolian archipelago in Sicily (ITALY).
KPIs have been proposed focusing on reliability and continuous operation, in particular addressing:
– Interface Design (operability)
– Architectural Design (distributed system)
– Incident and Connection Management (robustness)
– Operational Robustness (reliability)