Overview
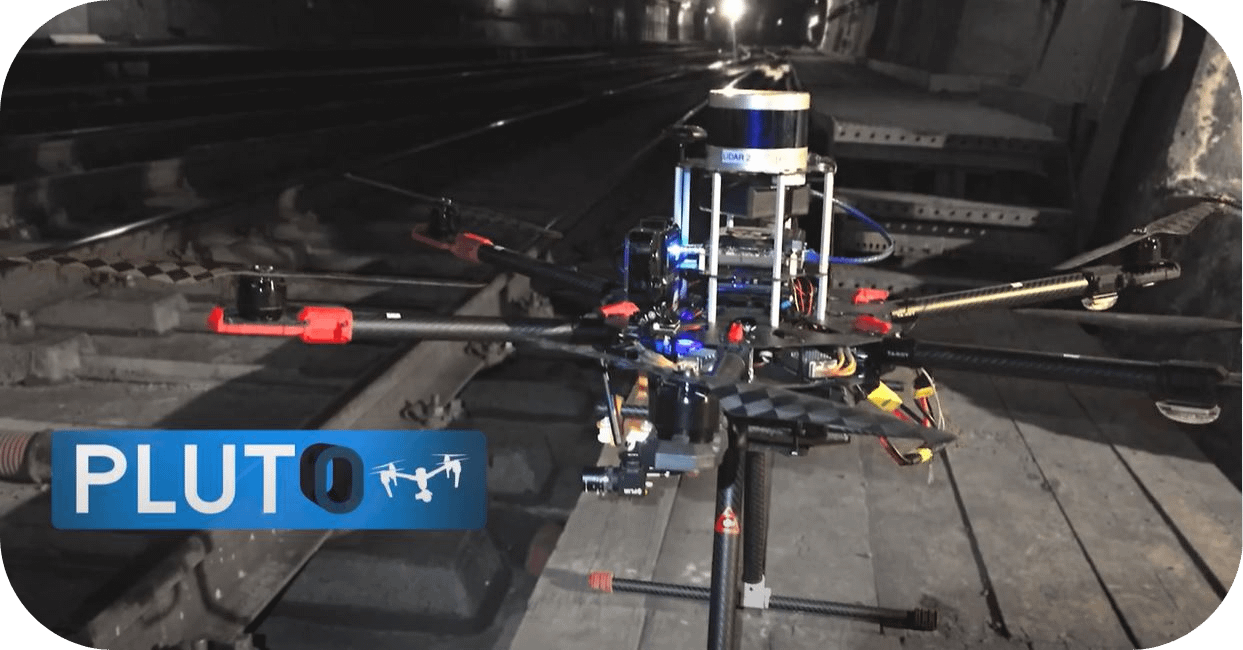
PLUTO will address the construction challenge (C2.A1), related to the tunnel inspection. PLUTO will demonstrate the autonomous inspection of rail tunnels.
SYSTEM ABILITIES: Autonomous navigation in confined spaces using pre-existing maps Automatic identification of tunnel deterioration for inspection and monitoring purposes, through Neural Networks.
SYSTEM COMPONENTS: The drone, having to perform an autonomous navigation, is equipped with a very powerful computational unit and a large recording space for the collected data. Its operation is mainly based on the ROS (Robot Operating System) platform and on the nodes (ROS applications) developed internally and by third parties to manage the hardware and the autonomous navigation and data collection functions. The application platform is built on .NET Core and consists of a web interface for the management of missions, a streaming communication with the drone for real-time monitoring and an archive management for the planning of missions and the backup of the collected data.