Consortium:
IT+Robotics, University of Padova
Project Hashtag:
#SPIWI
Watch the experiment’s video here.
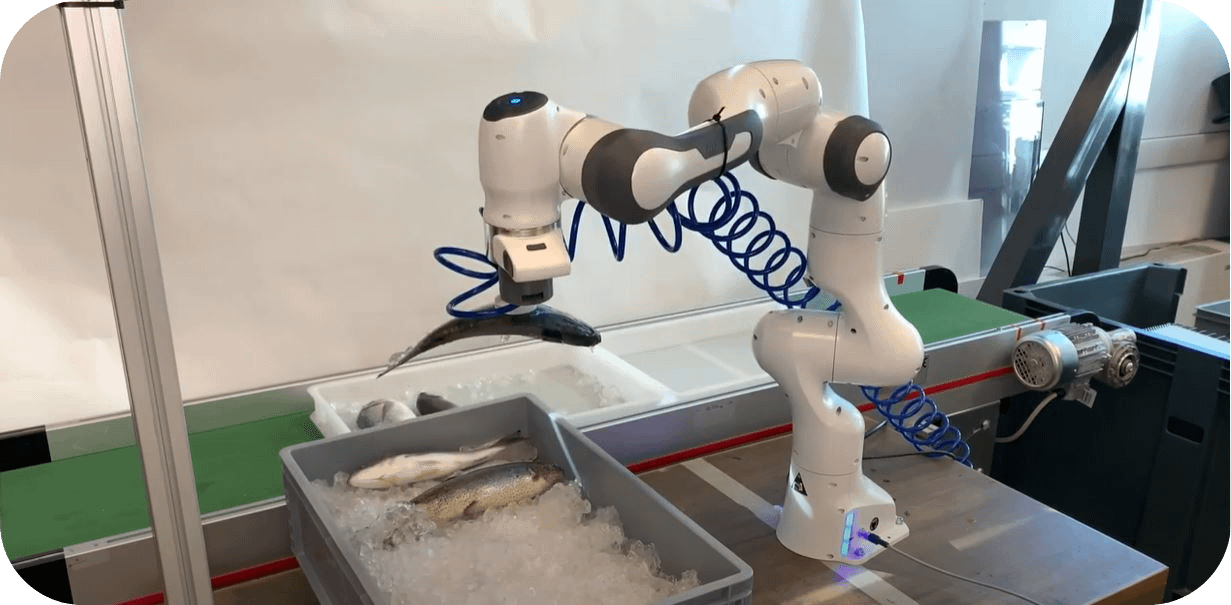
Overview
SPIWI project will exploit RGB images and depth information to identify fish in the trays and establish suitable grasping points. The challenges related to fish shape variability will be addressed by coupling instance segmentation DNN models with state-of-the-art model-based deformable object registration algorithms. The vision system will guide a robot equipped with a hybrid softsuction gripper to grasp the product. Initially, a load cell will ensure that each tray is kept within specified limits, while in the second phase of the project a data-driven predictive weighing module will take care of this task assessing the likely weight of fish.
SPIWI aims to produce a big step forward in current industrial robot systems used in the food processing industry. The application of vision-guided robot technologies in the food industry could have a strong impact on safety and health in the workplace, hygiene of the processes, and production efficiency. SPIWI technology could be easily adaptable to a wide range of food processing applications thus greatly improving its potential impact. In the prototype phase, it is expected that SPIWI system will be able to achieve a success rate of over 90% in identifying and pick up fish. Moreover, it will be able to successfully execute placement trajectory more than 95% of the time. In the second phase, the overall system performance will be improved, and the weight assessment module will reduce the number of re-grasps due to an incorrect weight fish under 20%.